12 Characteristics of Force
Characteristics of Force
12–1What is a force?
Although it is interesting and worthwhile to study the physical laws simply because they help us to understand and to use nature, one ought to stop every once in a while and think, “What do they really mean?” The meaning of any statement is a subject that has interested and troubled philosophers from time immemorial, and the meaning of physical laws is even more interesting, because it is generally believed that these laws represent some kind of real knowledge. The meaning of knowledge is a deep problem in philosophy, and it is always important to ask, “What does it mean?”
Let us ask, “What is the meaning of the physical laws of Newton, which we write as $F=ma$? What is the meaning of force, mass, and acceleration?” Well, we can intuitively sense the meaning of mass, and we can define acceleration if we know the meaning of position and time. We shall not discuss those meanings, but shall concentrate on the new concept of force. The answer is equally simple: “If a body is accelerating, then there is a force on it.” That is what Newton’s laws say, so the most precise and beautiful definition of force imaginable might simply be to say that force is the mass of an object times the acceleration. Suppose we have a law which says that the conservation of momentum is valid if the sum of all the external forces is zero; then the question arises, “What does it mean, that the sum of all the external forces is zero?” A pleasant way to define that statement would be: “When the total momentum is a constant, then the sum of the external forces is zero.” There must be something wrong with that, because it is just not saying anything new. If we have discovered a fundamental law, which asserts that the force is equal to the mass times the acceleration, and then define the force to be the mass times the acceleration, we have found out nothing. We could also define force to mean that a moving object with no force acting on it continues to move with constant velocity in a straight line. If we then observe an object not moving in a straight line with a constant velocity, we might say that there is a force on it. Now such things certainly cannot be the content of physics, because they are definitions going in a circle. The Newtonian statement above, however, seems to be a most precise definition of force, and one that appeals to the mathematician; nevertheless, it is completely useless, because no prediction whatsoever can be made from a definition. One might sit in an armchair all day long and define words at will, but to find out what happens when two balls push against each other, or when a weight is hung on a spring, is another matter altogether, because the way the bodies behave is something completely outside any choice of definitions.
For example, if we were to choose to say that an object left to itself keeps its position and does not move, then when we see something drifting, we could say that must be due to a “gorce”—a gorce is the rate of change of position. Now we have a wonderful new law, everything stands still except when a gorce is acting. You see, that would be analogous to the above definition of force, and it would contain no information. The real content of Newton’s laws is this: that the force is supposed to have some independent properties, in addition to the law $F=ma$; but the specific independent properties that the force has were not completely described by Newton or by anybody else, and therefore the physical law $F=ma$ is an incomplete law. It implies that if we study the mass times the acceleration and call the product the force, i.e., if we study the characteristics of force as a program of interest, then we shall find that forces have some simplicity; the law is a good program for analyzing nature, it is a suggestion that the forces will be simple.
Now the first example of such forces was the complete law of gravitation, which was given by Newton, and in stating the law he answered the question, “What is the force?” If there were nothing but gravitation, then the combination of this law and the force law (second law of motion) would be a complete theory, but there is much more than gravitation, and we want to use Newton’s laws in many different situations. Therefore in order to proceed we have to tell something about the properties of force.
For example, in dealing with force the tacit assumption is always made that the force is equal to zero unless some physical body is present, that if we find a force that is not equal to zero we also find something in the neighborhood that is a source of the force. This assumption is entirely different from the case of the “gorce” that we introduced above. One of the most important characteristics of force is that it has a material origin, and this is not just a definition.
Newton also gave one rule about the force: that the forces between interacting bodies are equal and opposite—action equals reaction(See wave reflection); that rule, it turns out, is not exactly true. In fact, the law $F=ma$ is not exactly true; if it were a definition we should have to say that it is always exactly true; but it is not.
The student may object, “I do not like this imprecision, I should like to have everything defined exactly; in fact, it says in some books that any science is an exact subject, in which everything is defined.” If you insist upon a precise definition of force, you will never get it! First, because Newton’s Second Law is not exact, and second, because in order to understand physical laws you must understand that they are all some kind of approximation.
Any simple idea is approximate; as an illustration, consider an object, … what is an object? Philosophers are always saying, “Well, just take a chair for example.” The moment they say that, you know that they do not know what they are talking about any more. What is a chair? Well, a chair is a certain thing over there … certain?, how certain? The atoms are evaporating from it from time to time—not many atoms, but a few—dirt falls on it and gets dissolved in the paint; so to define a chair precisely, to say exactly which atoms are chair, and which atoms are air, or which atoms are dirt, or which atoms are paint that belongs to the chair is impossible. So the mass of a chair can be defined only approximately. In the same way, to define the mass of a single object is impossible, because there are not any single, left-alone objects in the world—every object is a mixture of a lot of things, so we can deal with it only as a series of approximations and idealizations.
The trick is the idealizations. To an excellent approximation of perhaps one part in $10^{10}$, the number of atoms in the chair does not change in a minute, and if we are not too precise we may idealize the chair as a definite thing; in the same way we shall learn about the characteristics of force, in an ideal fashion, if we are not too precise. One may be dissatisfied with the approximate view of nature that physics tries to obtain (the attempt is always to increase the accuracy of the approximation), and may prefer a mathematical definition; but mathematical definitions can never work in the real world. A mathematical definition will be good for mathematics, in which all the logic can be followed out completely, but the physical world is complex, as we have indicated in a number of examples, such as those of the ocean waves and a glass of wine. When we try to isolate pieces of it, to talk about one mass, the wine and the glass, how can we know which is which, when one dissolves in the other? The forces on a single thing already involve approximation, and if we have a system of discourse about the real world, then that system, at least for the present day, must involve approximations of some kind.
This system is quite unlike the case of mathematics, in which everything can be defined, and then we do not know what we are talking about. In fact, the glory of mathematics is that we do not have to say what we are talking about. The glory is that the laws, the arguments, and the logic are independent of what “it” is. If we have any other set of objects that obey the same system of axioms as Euclid’s geometry, then if we make new definitions and follow them out with correct logic, all the consequences will be correct, and it makes no difference what the subject was. In nature, however, when we draw a line or establish a line by using a light beam and a theodolite, as we do in surveying, are we measuring a line in the sense of Euclid? No, we are making an approximation; the cross hair has some width, but a geometrical line has no width, and so, whether Euclidean geometry can be used for surveying or not is a physical question, not a mathematical question. However, from an experimental standpoint, not a mathematical standpoint, we need to know whether the laws of Euclid apply to the kind of geometry that we use in measuring land; so we make a hypothesis that it does, and it works pretty well; but it is not precise, because our surveying lines are not really geometrical lines. Whether or not those lines of Euclid, which are really abstract, apply to the lines of experience is a question for experience; it is not a question that can be answered by sheer reason.
In the same way, we cannot just call $F=ma$ a definition, deduce everything purely mathematically, and make mechanics a mathematical theory, when mechanics is a description of nature. By establishing suitable postulates it is always possible to make a system of mathematics, just as Euclid did, but we cannot make a mathematics of the world, because sooner or later we have to find out whether the axioms are valid for the objects of nature. Thus we immediately get involved with these complicated and “dirty” objects of nature, but with approximations ever increasing in accuracy.
2025.11.17: 논리적 도구 수학과 물리 현상의 link+interpretation
Nature description 목적으로 고안된, 수학의 결함은 인간의 perceptive physical interpretation으로 보완되어 왔다.
2022.2.5: idealistic 직관 극한적 수식화 작업, 즉 자연의 simulation인 수학은 인간 감각 3차원 세계와 고차원을 연결해 주는데...
2025.4.25: 그 연관성(수학적 묘사과 자연 현상 1-1 correspondence missing link) 인식은, 통찰적 감지능력/perception에 의한 거고, 예를 들면
1. 곱씹고 새겨야할 것들
(1) 맥스웰은, 빛이 전자파라는 걸 단정하기까지 대응성 체크(analytic quantity 관계식)들로부터 발생한 perception으로, 전자기파 존재 확신
2025.10.11: 고차원과 3차원 연결성, sort of blowup or upload
(2) 포앙카레-호프의 정리, 피타고라스 정리 등에 constraint 존재를 고려하면, 벌집 형성, crystal structure 등도 constraint에 의해 결정되는 것이 아닌가 한다.
수학이 아닌 다른 수단, 기하학적 내지 이집트 벽화의 상형적 표현이 필요한 건지
미래를 볼 수 있는가? 현재가 과거에 영향 받는다는 거, 뭐 당연한 거지만...
과거 언급 부분 past1, past2. 시간 포함한 3차원에 structure 보존 법칙이 존재한다면? 세상이 일방통행이지만 않은 것처럼 미래가 현재에 영향 가능.
(3) 그 밖에
11.18: 방향과 길이만 갖는 벡터로 묘사되는 기는 measurable, $E=mc^2$로부터 명백
지구 팽이 움직임
2. 파인만의 조언
3. 찾아보기
2024.5.5: 자연에는 수학에서의 equal이 없다, 컴퓨터 프로그램에 허용되지 않듯. 그런데 그 unequality가 nature를 역동적으로 만드는 것.
12–2Friction
The foregoing considerations show that a true understanding of Newton’s laws requires a discussion of forces, and it is the purpose of this chapter to introduce such a discussion, as a kind of completion of Newton’s laws. We have already studied the definitions of acceleration and related ideas, but now we have to study the properties of force, and this chapter, unlike the previous chapters, will not be very precise, because forces are quite complicated.
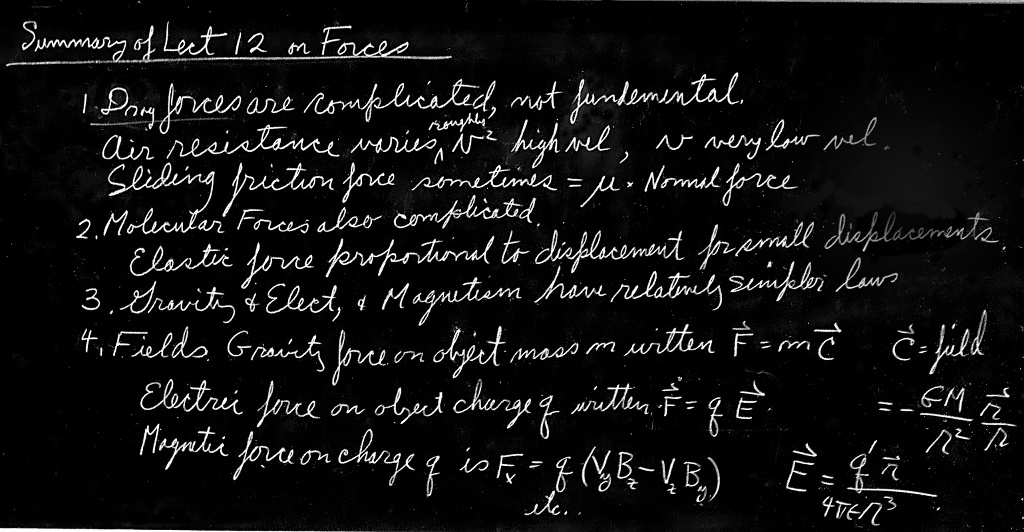
To begin with a particular force, let us consider the drag on an airplane flying through the air. What is the law for that force? (Surely there is a law for every force, we must have a law!) One can hardly think that the law for that force will be simple. Try to imagine what makes a drag on an airplane flying through the air—the air rushing over the wings, the swirling in the back, the changes going on around the fuselage, and many other complications, and you see that there is not going to be a simple law. On the other hand, it is a remarkable fact that the drag force on an airplane is approximately a constant times the square of the velocity, or $F\approx cv^2$.
Now what is the status of such a law, is it analogous to $F=ma$? Not at all, because in the first place this law is an empirical thing that is obtained roughly by tests in a wind tunnel. You say, “Well $F=ma$ might be empirical too.” That is not the reason that there is a difference. The difference is not that it is empirical, but that, as we understand nature, this law is the result of an enormous complexity of events and is not, fundamentally, a simple thing. If we continue to study it more and more, measuring more and more accurately, the law will continue to become more complicated, not less. In other words, as we study this law of the drag on an airplane more and more closely, we find out that it is “falser” and “falser,” and the more deeply we study it, and the more accurately we measure, the more complicated the truth becomes; so in that sense we consider it not to result from a simple, fundamental process, which agrees with our original surmise. For example, if the velocity is extremely low, so low that an ordinary airplane is not flying, as when the airplane is dragged slowly through the air, then the law changes, and the drag friction depends more nearly linearly on the velocity. To take another example, the frictional drag on a ball or a bubble or anything that is moving slowly through a viscous liquid like honey, is proportional to the velocity, but for motion so fast that the fluid swirls around (honey does not but water and air do) then the drag becomes more nearly proportional to the square of the velocity ($F=cv^2$), and if the velocity continues to increase, then even this law begins to fail. People who say, “Well the coefficient changes slightly,” are dodging the issue. Second, there are other great complications: can this force on the airplane be divided or analyzed as a force on the wings, a force on the front, and so on? Indeed, this can be done, if we are concerned about the torques here and there, but then we have to get special laws for the force on the wings, and so on. It is an amazing fact that the force on a wing depends upon the other wing: in other words, if we take the airplane apart and put just one wing in the air, then the force is not the same as if the rest of the plane were there. The reason, of course, is that some of the wind that hits the front goes around to the wings and changes the force on the wings. It seems a miracle that there is such a simple, rough, empirical law that can be used in the design of airplanes, but this law is not in the same class as the basic laws of physics, and further study of it will only make it more and more complicated. A study of how the coefficient $c$ depends on the shape of the front of the airplane is, to put it mildly, frustrating. There just is no simple law for determining the coefficient in terms of the shape of the airplane. In contrast, the law of gravitation is simple, and further study only indicates its greater simplicity.
We have just discussed two cases of friction, resulting from fast movement in air and slow movement in honey. There is another kind of friction, called dry friction or sliding friction, which occurs when one solid body slides on another. In this case a force is needed to maintain motion. This is called a frictional force, and its origin, also, is a very complicated matter. Both surfaces of contact are irregular, on an atomic level. There are many points of contact where the atoms seem to cling together, and then, as the sliding body is pulled along, the atoms snap apart and vibration ensues; something like that has to happen. Formerly the mechanism of this friction was thought to be very simple, that the surfaces were merely full of irregularities and the friction originated in lifting the slider over the bumps; but this cannot be, for there is no loss of energy in that process, whereas power is in fact consumed. The mechanism of power loss is that as the slider snaps over the bumps, the bumps deform and then generate waves and atomic motions and, after a while, heat, in the two bodies. Now it is very remarkable that again, empirically, this friction can be described approximately by a simple law. This law is that the force needed to overcome friction and to drag one object over another depends upon the normal force (i.e., perpendicular to the surface) between the two surfaces that are in contact. Actually, to a fairly good approximation, the frictional force is proportional to this normal force, and has a more or less constant coefficient; that is, \begin{equation} \label{Eq:I:12:1} F=\mu N, \end{equation} where $\mu$ is called the coefficient of friction (Fig. 12–1). Although this coefficient is not exactly constant, the formula is a good empirical rule for judging approximately the amount of force that will be needed in certain practical or engineering circumstances. If the normal force or the speed of motion gets too big, the law fails because of the excessive heat generated. It is important to realize that each of these empirical laws has its limitations, beyond which it does not really work.
That the formula $F=\mu N$ is approximately correct can be demonstrated by a simple experiment. We set up a plane, inclined at a small angle $\theta$, and place a block of weight $W$ on the plane. We then tilt the plane at a steeper angle, until the block just begins to slide from its own weight. The component of the weight downward along the plane is $W\sin\theta$, and this must equal the frictional force $F$ when the block is sliding uniformly. The component of the weight normal to the plane is $W\cos\theta$, and this is the normal force $N$. With these values, the formula becomes $W\sin\theta=\mu W\cos\theta$, from which we get $\mu=$ $\sin\theta/\cos\theta=$ $\tan\theta$. If this law were exactly true, an object would start to slide at some definite inclination. If the same block is loaded by putting extra weight on it, then, although $W$ is increased, all the forces in the formula are increased in the same proportion, and $W$ cancels out. If $\mu$ stays constant, the loaded block will slide again at the same slope. When the angle $\theta$ is determined by trial with the original weight, it is found that with the greater weight the block will slide at about the same angle. This will be true even when one weight is many times as great as the other, and so we conclude that the coefficient of friction is independent of the weight.
In performing this experiment it is noticeable that when the plane is tilted at about the correct angle $\theta$, the block does not slide steadily but in a halting fashion. At one place it may stop, at another it may move with acceleration. This behavior indicates that the coefficient of friction is only roughly a constant, and varies from place to place along the plane. The same erratic behavior is observed whether the block is loaded or not. Such variations are caused by different degrees of smoothness or hardness of the plane, and perhaps dirt, oxides, or other foreign matter. The tables that list purported values of $\mu$ for “steel on steel,” “copper on copper,” and the like, are all false, because they ignore the factors mentioned above, which really determine $\mu$. The friction is never due to “copper on copper,” etc., but to the impurities clinging to the copper.
In experiments of the type described above, the friction is nearly independent of the velocity. Many people believe that the friction to be overcome to get something started (static friction) exceeds the force required to keep it sliding (sliding friction), but with dry metals it is very hard to show any difference. The opinion probably arises from experiences where small bits of oil or lubricant are present, or where blocks, for example, are supported by springs or other flexible supports so that they appear to bind.
It is quite difficult to do accurate quantitative experiments in friction, and the laws of friction are still not analyzed very well, in spite of the enormous engineering value of an accurate analysis. Although the law $F=\mu N$ is fairly accurate once the surfaces are standardized, the reason for this form of the law is not really understood. To show that the coefficient $\mu$ is nearly independent of velocity requires some delicate experimentation, because the apparent friction is much reduced if the lower surface vibrates very fast. When the experiment is done at very high speed, care must be taken that the objects do not vibrate relative to one another, since apparent decreases of the friction at high speed are often due to vibrations. At any rate, this friction law is another of those semiempirical laws that are not thoroughly understood, and in view of all the work that has been done it is surprising that more understanding of this phenomenon has not come about. At the present time, in fact, it is impossible even to estimate the coefficient of friction between two substances.
It was pointed out above that attempts to measure $\mu$ by sliding pure substances such as copper on copper will lead to spurious results, because the surfaces in contact are not pure copper, but are mixtures of oxides and other impurities. If we try to get absolutely pure copper, if we clean and polish the surfaces, outgas the materials in a vacuum, and take every conceivable precaution, we still do not get $\mu$. For if we tilt the apparatus even to a vertical position, the slider will not fall off—the two pieces of copper stick together! The coefficient $\mu$, which is ordinarily less than unity for reasonably hard surfaces, becomes several times unity! The reason for this unexpected behavior is that when the atoms in contact are all of the same kind, there is no way for the atoms to “know” that they are in different pieces of copper. When there are other atoms, in the oxides and greases and more complicated thin surface layers of contaminants in between, the atoms “know” when they are not on the same part. When we consider that it is forces between atoms that hold the copper together as a solid, it should become clear that it is impossible to get the right coefficient of friction for pure metals.
The same phenomenon can be observed in a simple home-made experiment with a flat glass plate and a glass tumbler. If the tumbler is placed on the plate and pulled along with a loop of string, it slides fairly well and one can feel the coefficient of friction; it is a little irregular, but it is a coefficient. If we now wet the glass plate and the bottom of the tumbler and pull again, we find that it binds, and if we look closely we shall find scratches, because the water is able to lift the grease and the other contaminants off the surface, and then we really have a glass-to-glass contact; this contact is so good that it holds tight and resists separation so much that the glass is torn apart; that is, it makes scratches.
12–3Molecular forces
We shall next discuss the characteristics of molecular forces. These are forces between the atoms, and are the ultimate origin of friction. Molecular forces have never been satisfactorily explained on a basis of classical physics; it takes quantum mechanics to understand them fully. Empirically, however, the force between atoms is illustrated schematically in Fig. 12–2, where the force $F$ between two atoms is plotted as a function of the distance $r$ between them. There are different cases: in the water molecule, for example, the negative charges sit more on the oxygen, and the mean positions of the negative charges and of the positive charges are not at the same point; consequently, another molecule nearby feels a relatively large force, which is called a dipole-dipole force. However, for many systems the charges are very much better balanced, in particular for oxygen gas, which is perfectly symmetrical. In this case, although the minus charges and the plus charges are dispersed over the molecule, the distribution is such that the center of the minus charges and the center of the plus charges coincide. A molecule where the centers do not coincide is called a polar molecule, and charge times the separation between centers is called the dipole moment. A nonpolar molecule is one in which the centers of the charges coincide. For all nonpolar molecules, in which all the electrical forces are neutralized, it nevertheless turns out that the force at very large distances is an attraction and varies inversely as the seventh power of the distance, or $F=k/r^7$, where $k$ is a constant that depends on the molecules. Why this is we shall learn only when we learn quantum mechanics. When there are dipoles the forces are greater. When atoms or molecules get too close they repel with a very large repulsion; that is what keeps us from falling through the floor!
These molecular forces can be demonstrated in a fairly direct way: one of these is the friction experiment with a sliding glass tumbler; another is to take two very carefully ground and lapped surfaces which are very accurately flat, so that the surfaces can be brought very close together. An example of such surfaces is the Johansson blocks that are used in machine shops as standards for making accurate length measurements. If one such block is slid over another very carefully and the upper one is lifted, the other one will adhere and also be lifted by the molecular forces, exemplifying the direct attraction between the atoms on one block for the atoms on the other block.
Nevertheless these molecular forces of attraction are still not fundamental in the sense that gravitation is fundamental; they are due to the vastly complex interactions of all the electrons and nuclei in one molecule with all the electrons and nuclei in another. Any simple-looking formula we get represents a summation of complications, so we still have not got the fundamental phenomena.
Since the molecular forces attract at large distances and repel at short distances, as shown in Fig. 12–2, we can make up solids in which all the atoms are held together by their attractions and held apart by the repulsion that sets in when they are too close together. At a certain distance $d$ (where the graph in Fig. 12–2 crosses the axis) the forces are zero, which means that they are all balanced, so that the molecules stay that distance apart from one another. If the molecules are pushed closer together than the distance $d$ they all show a repulsion, represented by the portion of the graph above the $r$-axis. To push the molecules only slightly closer together requires a great force, because the molecular repulsion rapidly becomes very great at distances less than $d$. If the molecules are pulled slightly apart there is a slight attraction, which increases as the separation increases. If they are pulled sufficiently hard, they will separate permanently—the bond is broken.
If the molecules are pushed only a very small distance closer, or pulled only a very small distance farther than $d$, the corresponding distance along the curve of Fig. 12–2 is also very small, and can then be approximated by a straight line. Therefore, in many circumstances, if the displacement is not too great the force is proportional to the displacement. This principle is known as Hooke’s law, or the law of elasticity, which says that the force in a body which tries to restore the body to its original condition when it is distorted is proportional to the distortion. This law, of course, holds true only if the distortion is relatively small; when it gets too large the body will be torn apart or crushed, depending on the kind of distortion. The amount of force for which Hooke’s law is valid depends upon the material; for instance, for dough or putty the force is very small, but for steel it is relatively large. Hooke’s law can be nicely demonstrated with a long coil spring, made of steel and suspended vertically. A suitable weight hung on the lower end of the spring produces a tiny twist throughout the length of the wire, which results in a small vertical deflection in each turn and adds up to a large displacement if there are many turns. If the total elongation produced, say, by a $100$-gram weight, is measured, it is found that additional weights of $100$ grams will each produce an additional elongation that is very nearly equal to the stretch that was measured for the first $100$ grams. This constant ratio of force to displacement begins to change when the spring is overloaded, i.e., Hooke’s law no longer holds.
12–4Fundamental forces. Fields
We shall now discuss the only remaining forces that are fundamental. We call them fundamental in the sense that their laws are fundamentally simple. We shall first discuss electrical force. Objects carry electrical charges which consist simply of electrons or protons. If any two bodies are electrically charged, there is an electrical force between them, and if the magnitudes of the charges are $q_1$ and $q_2$, respectively, the force varies inversely as the square of the distance between the charges, or $F=(\text{const}) q_1q_2/r^2$. For unlike charges, this law is like the law of gravitation, but for like charges the force is repulsive and the sign (direction) is reversed. The charges $q_1$ and $q_2$ can be intrinsically either positive or negative, and in any specific application of the formula the direction of the force will come out right if the $q$’s are given the proper plus or minus sign; the force is directed along the line between the two charges. The constant in the formula depends, of course, upon what units are used for the force, the charge, and the distance. In current practice the charge is measured in coulombs, the distance in meters, and the force in newtons. Then, in order to get the force to come out properly in newtons, the constant (which for historical reasons is written $1/4\pi\epsO$) takes the numerical value \begin{equation*} \epsO=8.854\times10^{-12}\text{ coul}^2/\text{newton}\cdot\text{m}^2 \end{equation*} or \begin{equation*} 1/4\pi\epsO=8.99\times10^9\text{ N}\cdot\text{m}^2/\text{coul}^2. \end{equation*} Thus the force law for static charges is \begin{equation} \label{Eq:I:12:2} \FLPF=q_1q_2\FLPr/4\pi\epsO r^3. \end{equation} In nature, the most important charge of all is the charge on a single electron, which is $1.60\times10^{-19}$ coulomb. In working with electrical forces between fundamental particles rather than with large charges, many people prefer the combination $(q_{\text{el}})^2/4\pi\epsO$, in which $q_{\text{el}}$ is defined as the charge on an electron. This combination occurs frequently, and to simplify calculations it has been defined by the symbol $e^2$; its numerical value in the mks system of units turns out to be $(1.52\times10^{-14})^2$. The advantage of using the constant in this form is that the force between two electrons in newtons can then be written simply as $e^2/r^2$, with $r$ in meters, without all the individual constants. Electrical forces are much more complicated than this simple formula indicates, since the formula gives the force between two objects only when the objects are standing still. We shall consider the more general case shortly.
In the analysis of forces of the more fundamental kinds (not such forces as friction, but the electrical force or the gravitational force), an interesting and very important concept has been developed. Since at first sight the forces are very much more complicated than is indicated by the inverse-square laws and these laws hold true only when the interacting bodies are standing still, an improved method is needed to deal with the very complex forces that ensue when the bodies start to move in a complicated way. Experience has shown that an approach known as the concept of a “field” is of great utility for the analysis of forces of this type. To illustrate the idea for, say, electrical force, suppose we have two electrical charges, $q_1$ and $q_2$, located at points $P$ and $R$ respectively. Then the force between the charges is given by \begin{equation} \label{Eq:I:12:3} \FLPF=q_1q_2\FLPr/4\pi\epsO r^3. \end{equation} To analyze this force by means of the field concept, we say that the charge $q_1$ at $P$ produces a “condition” at $R$, such that when the charge $q_2$ is placed at $R$ it “feels” the force. This is one way, strange perhaps, of describing it; we say that the force $\FLPF$ on $q_2$ at $R$ can be written in two parts. It is $q_2$ multiplied by a quantity $\FLPE$ that would be there whether $q_2$ were there or not (provided we keep all the other charges in their right places). $\FLPE$ is the “condition” produced by $q_1$, we say, and $\FLPF$ is the response of $q_2$ to $\FLPE$. $\FLPE$ is called an electric field, and it is a vector. The formula for the electric field $\FLPE$ that is produced at $R$ by a charge $q_1$ at $P$ is the charge $q_1$ times the constant $1/4\pi\epsO$ divided by $r^2$ ($r$ is the distance from $P$ to $R$), and it is acting in the direction of the radius vector (the radius vector $\FLPr$ divided by its own length). The expression for $\FLPE$ is thus \begin{equation} \label{Eq:I:12:4} \FLPE=q_1\FLPr/4\pi\epsO r^3. \end{equation} We then write \begin{equation} \label{Eq:I:12:5} \FLPF=q_2\,\FLPE, \end{equation} which expresses the force, the field, and the charge in the field. What is the point of all this? The point is to divide the analysis into two parts. One part says that something produces a field. The other part says that something is acted on by the field. By allowing us to look at the two parts independently, this separation of the analysis simplifies the calculation of a problem in many situations. If many charges are present, we first work out the total electric field produced at $R$ by all the charges, and then, knowing the charge that is placed at $R$, we find the force on it.
In the case of gravitation, we can do exactly the same thing. In this case, where the force $\FLPF=-Gm_1m_2\FLPr/r^3$, we can make an analogous analysis, as follows: the force on a body in a gravitational field is the mass of that body times the field $\FLPC$. The force on $m_2$ is the mass $m_2$ times the field $\FLPC$ produced by $m_1$; that is, $\FLPF=m_2\FLPC$. Then the field $\FLPC$ produced by a body of mass $m_1$ is $\FLPC=-Gm_1\FLPr/r^3$ and it is directed radially, as in the electrical case.
In spite of how it might at first seem, this separation of one part from another is not a triviality. It would be trivial, just another way of writing the same thing, if the laws of force were simple, but the laws of force are so complicated that it turns out that the fields have a reality that is almost independent of the objects which create them. One can do something like shake a charge and produce an effect, a field, at a distance; if one then stops moving the charge, the field keeps track of all the past, because the interaction between two particles is not instantaneous. It is desirable to have some way to remember what happened previously. If the force upon some charge depends upon where another charge was yesterday, which it does, then we need machinery to keep track of what went on yesterday, and that is the character of a field. So when the forces get more complicated, the field becomes more and more real, and this technique becomes less and less of an artificial separation.
In analyzing forces by the use of fields, we need two kinds of laws pertaining to fields. The first is the response to a field, and that gives the equations of motion. For example, the law of response of a mass to a gravitational field is that the force is equal to the mass times the gravitational field; or, if there is also a charge on the body, the response of the charge to the electric field equals the charge times the electric field. The second part of the analysis of nature in these situations is to formulate the laws which determine the strength of the field and how it is produced. These laws are sometimes called the field equations. We shall learn more about them in due time, but shall write down a few things about them now.
First, the most remarkable fact of all, which is true exactly and which can be easily understood, is that the total electric field produced by a number of sources is the vector sum of the electric fields produced by the first source, the second source, and so on. In other words, if we have numerous charges making a field, and if all by itself one of them would make the field $\FLPE_1$, another would make the field $\FLPE_2$, and so on, then we merely add the vectors to get the total field. This principle can be expressed as \begin{equation} \label{Eq:I:12:6} \FLPE=\FLPE_1+\FLPE_2+\FLPE_3+\dotsb \end{equation} or, in view of the definition given above, \begin{equation} \label{Eq:I:12:7} \FLPE=\sum_i\frac{q_i\FLPr_i}{4\pi\epsO r_i^3}. \end{equation}
Can the same methods be applied to gravitation? The force between two masses $m_1$ and $m_2$ was expressed by Newton as $\FLPF=-Gm_1m_2\FLPr/r^3$. But according to the field concept, we may say that $m_1$ creates a field $\FLPC$ in all the surrounding space, such that the force on $m_2$ is given by \begin{equation} \label{Eq:I:12:8} \FLPF=m_2\FLPC. \end{equation} By complete analogy with the electrical case, \begin{equation} \label{Eq:I:12:9} \FLPC_i=-Gm_i\FLPr_i/r_i^3 \end{equation} and the gravitational field produced by several masses is \begin{equation} \label{Eq:I:12:10} \FLPC=\FLPC_1+\FLPC_2+\FLPC_3+\dotsb \end{equation} In Chapter 9, in working out a case of planetary motion, we used this principle in essence. We simply added all the force vectors to get the resultant force on a planet. If we divide out the mass of the planet in question, we get Eq. (12.10).
Equations (12.6) and (12.10) express what is known as the principle of superposition of fields. This principle states that the total field due to all the sources is the sum of the fields due to each source. So far as we know today, for electricity this is an absolutely guaranteed law, which is true even when the force law is complicated because of the motions of the charges. There are apparent violations, but more careful analysis has always shown these to be due to the overlooking of certain moving charges. However, although the principle of superposition applies exactly for electrical forces, it is not exact for gravity if the field is too strong, and Newton’s equation (12.10) is only approximate, according to Einstein’s gravitational theory.
Closely related to electrical force is another kind, called magnetic force, and this too is analyzed in terms of a field. Some of the qualitative relations between electrical and magnetic forces can be illustrated by an experiment with an electron-ray tube (Fig. 12–3). At one end of such a tube is a source that emits a stream of electrons. Within the tube are arrangements for accelerating the electrons to a high speed and sending some of them in a narrow beam to a fluorescent screen at the other end of the tube. A spot of light glows in the center of the screen where the electrons strike, and this enables us to trace the electron path. On the way to the screen the electron beam passes through a narrow space between a pair of parallel metal plates, which are arranged, say, horizontally. A voltage can be applied across the plates, so that either plate can be made negative at will. When such a voltage is present, there is an electric field between the plates.
The first part of the experiment is to apply a negative voltage to the lower plate, which means that extra electrons have been placed on the lower plate. Since like charges repel, the light spot on the screen instantly shifts upward. (We could also say this in another way—that the electrons “felt” the field, and responded by deflecting upward.) We next reverse the voltage, making the upper plate negative. The light spot on the screen now jumps below the center, showing that the electrons in the beam were repelled by those in the plate above them. (Or we could say again that the electrons had “responded” to the field, which is now in the reverse direction.)
The second part of the experiment is to disconnect the voltage from the plates and test the effect of a magnetic field on the electron beam. This is done by means of a horseshoe magnet, whose poles are far enough apart to more or less straddle the tube. Suppose we hold the magnet below the tube in the same orientation as the letter U, with its poles up and part of the tube in between. We note that the light spot is deflected, say, upward, as the magnet approaches the tube from below. So it appears that the magnet repels the electron beam. However, it is not that simple, for if we invert the magnet without reversing the poles side-for-side, and now approach the tube from above, the spot still moves upward, so the electron beam is not repelled; instead, it appears to be attracted this time. Now we start again, restoring the magnet to its original U orientation and holding it below the tube, as before. Yes, the spot is still deflected upward; but now turn the magnet $180$ degrees around a vertical axis, so that it is still in the U position but the poles are reversed side-for-side. Behold, the spot now jumps downward, and stays down, even if we invert the magnet and approach from above, as before.
To understand this peculiar behavior, we have to have a new combination of forces. We explain it thus: Across the magnet from one pole to the other there is a magnetic field. This field has a direction which is always away from one particular pole (which we could mark) and toward the other. Inverting the magnet did not change the direction of the field, but reversing the poles side-for-side did reverse its direction. For example, if the electron velocity were horizontal in the $x$-direction and the magnetic field were also horizontal but in the $y$-direction, the magnetic force on the moving electrons would be in the $z$-direction, i.e., up or down, depending on whether the field was in the positive or negative $y$-direction.
Although we shall not at the present time give the correct law of force between charges moving in an arbitrary manner, one relative to the other, because it is too complicated, we shall give one aspect of it: the complete law of the forces if the fields are known. The force on a charged object depends upon its motion; if, when the object is standing still at a given place, there is some force, this is taken to be proportional to the charge, the coefficient being what we call the electric field. When the object moves the force may be different, and the correction, the new “piece” of force, turns out to be dependent exactly linearly on the velocity, but at right angles to $\FLPv$ and to another vector quantity which we call the magnetic induction $\FLPB$. If the components of the electric field $\FLPE$ and the magnetic induction $\FLPB$ are, respectively, $(E_x,E_y,E_z)$ and ($B_x,B_y,B_z)$, and if the velocity $\FLPv$ has the components ($v_x,v_y,v_z)$, then the total electric and magnetic force on a moving charge $q$ has the components \begin{equation} \begin{alignedat}{7} &F_x&&=q(E_x&&+v_y&&B_z&&-v_z&&B_y&&),\\[.5ex] &F_y&&=q(E_y&&+v_z&&B_x&&-v_x&&B_z&&),\\[.5ex] &F_z&&=q(E_z&&+v_x&&B_y&&-v_y&&B_x&&). \end{alignedat} \label{Eq:I:12:11} \end{equation} If, for instance, the only component of the magnetic field were $B_y$ and the only component of the velocity were $v_x$, then the only term left in the magnetic force would be a force in the $z$-direction, at right angles to both $\FLPB$ and $\FLPv$.
12–5Pseudo forces
The next kind of force we shall discuss might be called a pseudo force. In Chapter 11 we discussed the relationship between two people, Joe and Moe, who use different coordinate systems. Let us suppose that the positions of a particle as measured by Joe are $x$ and by Moe are $x'$; then the laws are as follows: \begin{equation*} x=x'+s,\quad y=y',\quad z=z', \end{equation*} where $s$ is the displacement of Moe’s system relative to Joe’s. If we suppose that the laws of motion are correct for Joe, how do they look for Moe? We find first, that \begin{equation*} dx/dt=dx'/dt+ds/dt. \end{equation*} Previously, we considered the case where $s$ was constant, and we found that $s$ made no difference in the laws of motion, since $ds/dt = 0$; ultimately, therefore, the laws of physics were the same in both systems. But another case we can take is that $s = ut$, where $u$ is a uniform velocity in a straight line. Then $s$ is not constant, and $ds/dt$ is not zero, but is $u$, a constant. However, the acceleration $d^2x/dt^2$ is still the same as $d^2x'/dt^2$, because $du/dt = 0$. This proves the law that we used in Chapter 10, namely, that if we move in a straight line with uniform velocity the laws of physics will look the same to us as when we are standing still. That is the Galilean transformation. But we wish to discuss the interesting case where $s$ is still more complicated, say $s = at^2/2$. Then $ds/dt = at$ and $d^2s/dt^2 = a$, a uniform acceleration; or in a still more complicated case, the acceleration might be a function of time. This means that although the laws of motion from the point of view of Joe would look like \begin{equation*} m\,\frac{d^2x}{dt^2}=F_x, \end{equation*} the laws of motion as looked upon by Moe would appear as \begin{equation*} m\,\frac{d^2x'}{dt^2}=F_{x'}=F_x-ma. \end{equation*} That is, since Moe’s coordinate system is accelerating with respect to Joe’s, the extra term $ma$ comes in, and Moe will have to correct his forces by that amount in order to get Newton’s laws to work. In other words, here is an apparent, mysterious new force of unknown origin which arises, of course, because Moe has the wrong coordinate system. This is an example of a pseudo force; other examples occur in coordinate systems that are rotating.
Another example of pseudo force is what is often called “centrifugal force.” An observer in a rotating coordinate system, e.g., in a rotating box, will find mysterious forces, not accounted for by any known origin of force, throwing things outward toward the walls. These forces are due merely to the fact that the observer does not have Newton’s coordinate system, which is the simplest coordinate system.
Pseudo force can be illustrated by an interesting experiment in which we push a jar of water along a table, with acceleration. Gravity, of course, acts downward on the water, but because of the horizontal acceleration there is also a pseudo force acting horizontally and in a direction opposite to the acceleration. The resultant of gravity and pseudo force makes an angle with the vertical, and during the acceleration the surface of the water will be perpendicular to the resultant force, i.e., inclined at an angle with the table, with the water standing higher in the rearward side of the jar. When the push on the jar stops and the jar decelerates because of friction, the pseudo force is reversed, and the water stands higher in the forward side of the jar (Fig. 12–4).
One very important feature of pseudo forces is that they are always proportional to the masses; the same is true of gravity. The possibility exists, therefore, that gravity itself is a pseudo force. Is it not possible that perhaps gravitation is due simply to the fact that we do not have the right coordinate system? After all, we can always get a force proportional to the mass if we imagine that a body is accelerating. For instance, a man shut up in a box that is standing still on the earth finds himself held to the floor of the box with a certain force that is proportional to his mass. But if there were no earth at all and the box were standing still, the man inside would float in space. On the other hand, if there were no earth at all and something were pulling the box along with an acceleration $g$, then the man in the box, analyzing physics, would find a pseudo force which would pull him to the floor, just as gravity does.
2025.9.15: 같은 효과, 탈출과 decay
Einstein put forward the famous hypothesis that accelerations give an imitation of gravitation, that the forces of acceleration (the pseudo forces) cannot be distinguished from those of gravity; it is not possible to tell how much of a given force is gravity and how much is pseudo force.
It might seem all right to consider gravity to be a pseudo force, to say that we are all held down because we are accelerating upward, but how about the people in Madagascar, on the other side of the earth—are they accelerating too? Einstein found that gravity could be considered a pseudo force only at one point at a time, and was led by his considerations to suggest that the geometry of the world is more complicated than ordinary Euclidean geometry. The present discussion is only qualitative, and does not pretend to convey anything more than the general idea. To give a rough idea of how gravitation could be the result of pseudo forces, we present an illustration which is purely geometrical and does not represent the real situation. Suppose that we all lived in two dimensions, and knew nothing of a third. We think we are on a plane, but suppose we are really on the surface of a sphere. And suppose that we shoot an object along the ground, with no forces on it. Where will it go? It will appear to go in a straight line, but it has to remain on the surface of a sphere, where the shortest distance between two points is along a great circle; so it goes along a great circle. If we shoot another object similarly, but in another direction, it goes along another great circle. Because we think we are on a plane, we expect that these two bodies will continue to diverge linearly with time, but careful observation will show that if they go far enough they move closer together again, as though they were attracting each other. But they are not attracting each other—there is just something “weird” about this geometry. This particular illustration does not describe correctly the way in which Einstein’s geometry is “weird,” but it illustrates that if we distort the geometry sufficiently it is possible that all gravitation is related in some way to pseudo forces; that is the general idea of the Einsteinian theory of gravitation.
2024.3.4: 힘과 중력에 대하여
1. 힘의 정의는 움직임의 변화로 정의되었다, 뉴튼에 의하여.
2. 아인슈타인의 질량 흐름
3. 위에 파인만 설명예을 보고 드는 건 중력이란 질량들의 움직임 즉, 에너지들 움직임으로 생기는, 움직임의 밀도, 기하적 구조에 의한 것이 아니냐는...
3.14: Coriolis force 역시나... 운동량 변화는 힘이라고 정의한 뉴튼의 formulation을 유지하려다 보니 힘이란 게 있다고 하고 그 힘을 Coriolis라고 하는 것 같다.
그냥 파인만이 보여준 것처럼 원운동하는 상태에서 자연스럽게 생기는 움직임 행태이지 않은가? 결국 힘이란 것은 움직임들이 만들어 내는 것에 지나지 않느냐는 거다
12–6Nuclear forces
We conclude this chapter with a brief discussion of the only other known forces, which are called nuclear forces. These forces are within the nuclei of atoms, and although they are much discussed, no one has ever calculated the force between two nuclei, and indeed at present there is no known law for nuclear forces. These forces have a very tiny range which is just about the same as the size of the nucleus, perhaps $10^{-13}$ centimeter. With particles so small and at such a tiny distance, only the quantum-mechanical laws are valid, not the Newtonian laws. In nuclear analysis we no longer think in terms of forces, and in fact we can replace the force concept with a concept of the energy of interaction of two particles, a subject that will be discussed later. Any formula that can be written for nuclear forces is a rather crude approximation which omits many complications; one might be somewhat as follows: forces within a nucleus do not vary inversely as the square of the distance, but die off exponentially over a certain distance $r$, as expressed by $F=(1/r^2)\exp(-r/r_0)$, where the distance $r_0$ is of the order of $10^{-13}$ centimeter. In other words, the forces disappear as soon as the particles are any great distance apart, although they are very strong within the $10^{-13}$ centimeter range. So far as they are understood today, the laws of nuclear force are very complex; we do not understand them in any simple way, and the whole problem of analyzing the fundamental machinery behind nuclear forces is unsolved. Attempts at a solution have led to the discovery of numerous strange particles, the $\pi$-mesons, for example, but the origin of these forces remains obscure.